Darwin Vision Library®Image Processing Library
we developed independently.
Darwin Vision Library® includes high-performance tools necessary for building machine vision application. We developed it with our own know-how over the years as a specialized image processing company.
Semiconductor
- High accracy alignment
- Wafer Inspection
- ID reading

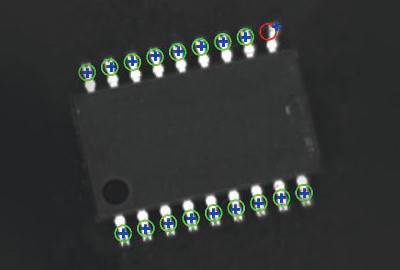
Electronics
- High accracy alignment
- Electronic component Inspection
- Dimension Inspection
- Paste Inspection

Pharmaceutial
- GS-1DataBar Cord (RSS Code) reading and verification
- Print Labbel Inspection
- Tablet Inspection
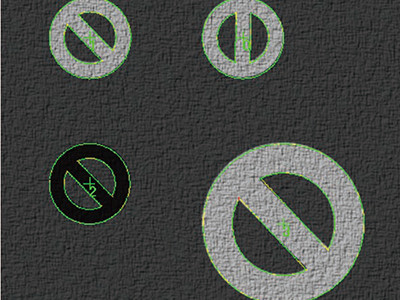
X-Match®/Geometric search
High-accuracy and high-speed alignment
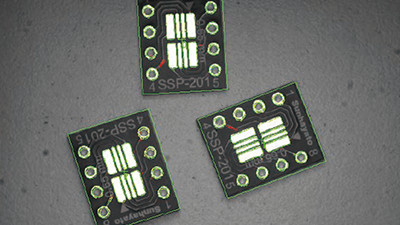
Using geometric shape data as a model, search the position where the geometric shape matches inside the target image, and output the placement information.
Robust Recognition
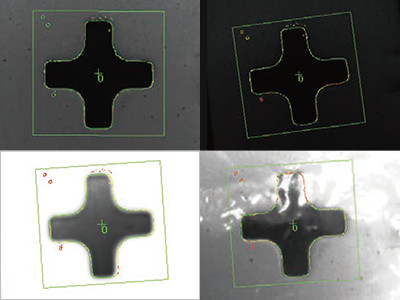
Irregular change in brightness, noise, shading, etc.
Support for artificial model training
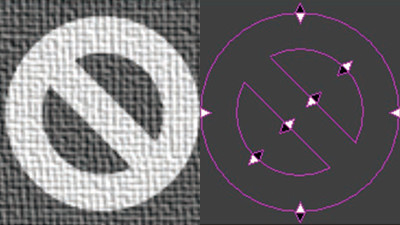
Locates objects whose appearance is rotated and scaled.
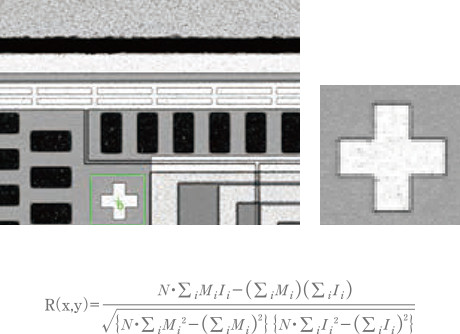
Normalized correlation search
Using the normalized correlation search, the pre-registered model image is searched inside other images and the arrangement information is output.
Evaluate similarity of pixel value of model image and target image using normalized correlation.
This tool lets you find feature instances at different rotations and scales.
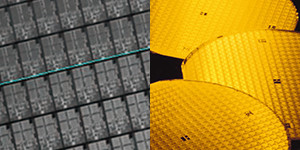
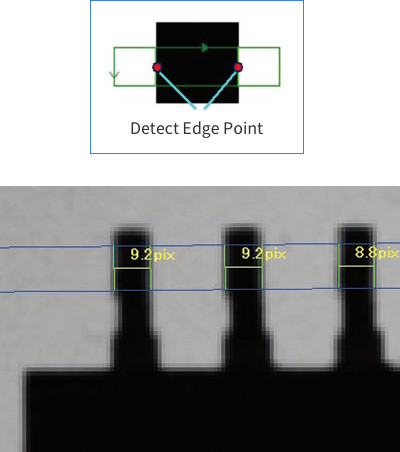
Caliper edge measurement
It detects the edge of the object and measures the position and size accurately and at high speed.
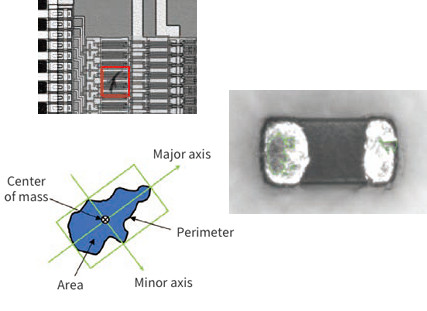
Blob analysis
It extracts blobs in the grayscale image and calculates various measurement values related to the shape.
Measurement value: Individual characteristics of blob such as area, center of gravity, perimeter and moment of inertia, inclusion relation between blobs (topology).
Dynamic thresholding
Even when there is shading in the image, the threshold is dynamically changed. so stable binarization result can be obtained.
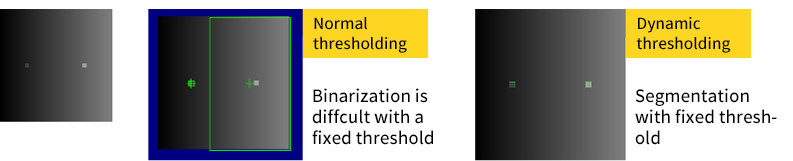
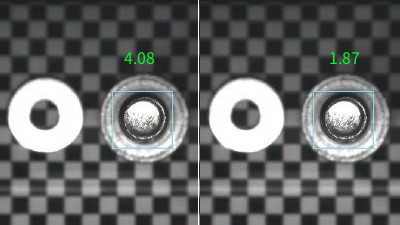
Image sharpness measurement
It computes a measure of the sharpness of an input image. It is mainly applied to automatic focus adjustment.
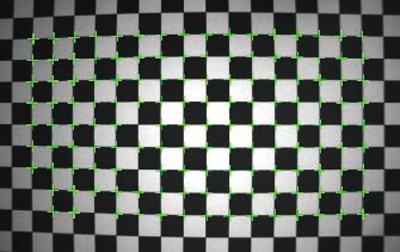
Calibration
Depending on the optical characteristics of the camera and the positional relationship with the object plane, nonlinearity. And the means to make correction is provided when spatial distortion appears.
Point match tool
It returns the transformation that describes the difference between the trained points and the run-time points.
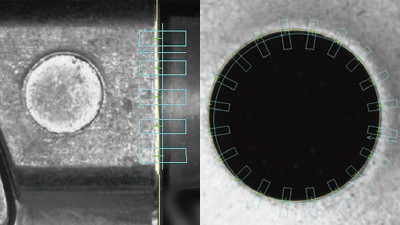
Geometric shape detection
This tool fit the edge points detected from an image to the desired shape ( line, circle, rectangle) and finds the position of the geometric shapes in the image.